| | |
 |
Combining 3D Shape, Color, and Motion for Robust Anytime Tracking
David Held, Jesse Levinson, Sebastian Thrun, Silvio Savarese.
Robotics: Science and Systems (RSS), 2014.
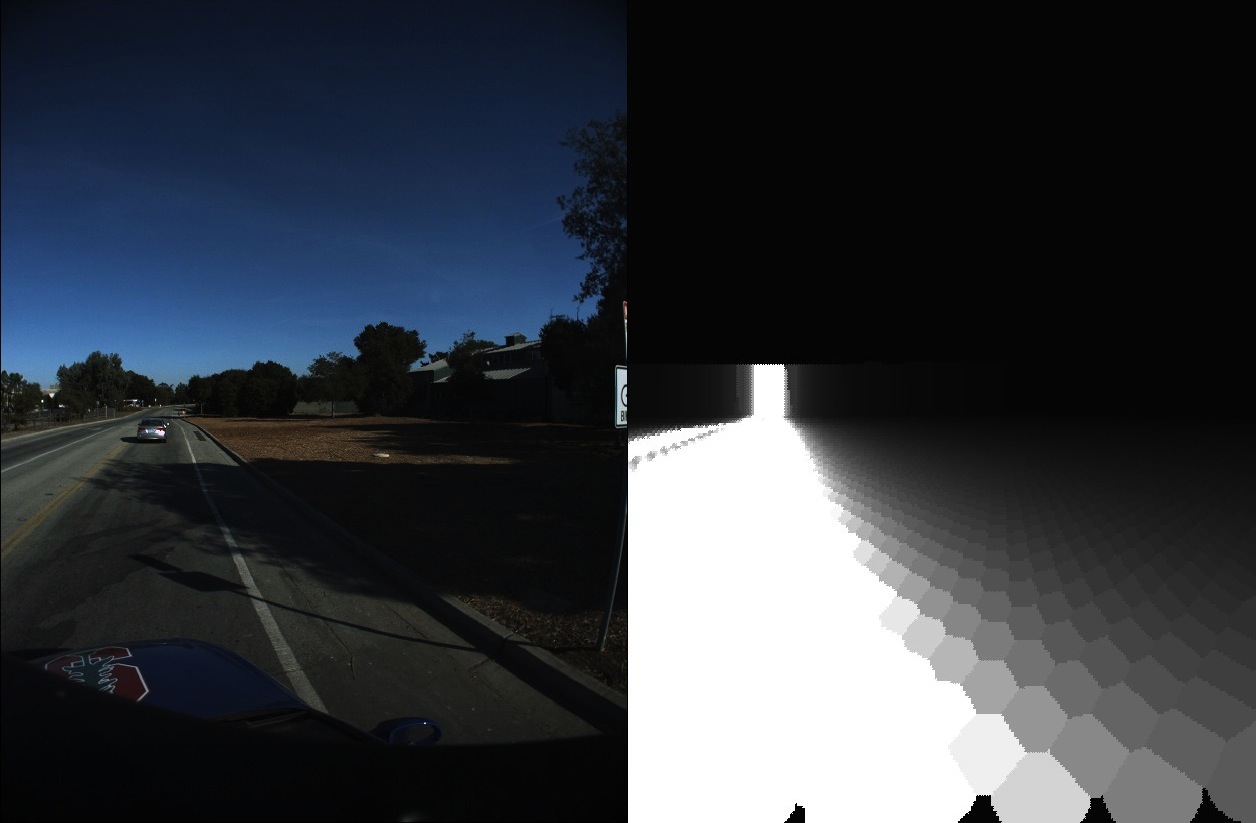
Improving on our ICRA 2013 paper, this new approach enables real-time probabilistic object tracking. Now, computational time is allocated dynamically according to the shape of the track’s posterior distribution. The algorithm is “anytime”, allowing speed or accuracy to be optimized based on the needs of the application. We currently use this method to track all dynamic obstacles seen by our autonomous vehicle, in real-time, with significantly improved accuracy compared to our previous Kalman-filter based approach.
pdf (rss),
Project Page - Supplementary material, C++ code, poster, presentation,
bib
|
 |
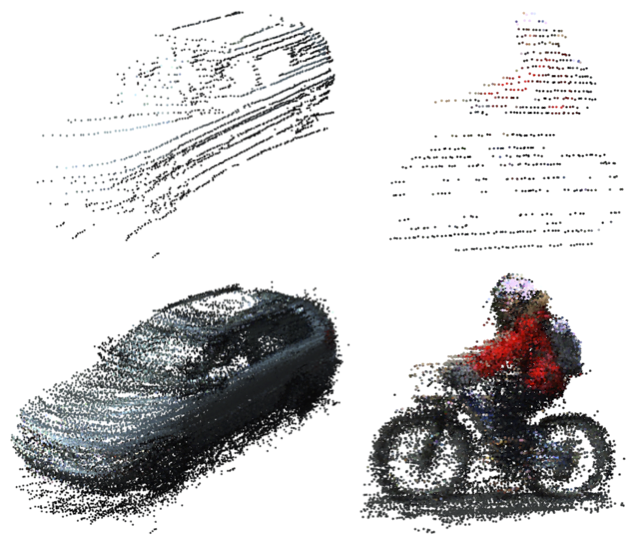
Group Induction
Alex Teichman and Sebastian Thrun.
Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2013.
Tracking-based semi-supervised learning, as originally presented at RSS2011, was an offline algorithm. This is fine in some contexts, but ideally a user could provide new hand-labeled training examples online, as the system runs, without retraining from scratch. Qualitatively, this would mean the ability to point out - from the back seat of your autonomous car - a few examples of, say, an elliptical bike or sk8poler, and the algorithm would start learning to recognize them on the fly without you having to do anything else. Group induction is a mathematical framework for this kind of learning.
pdf,
bib
|
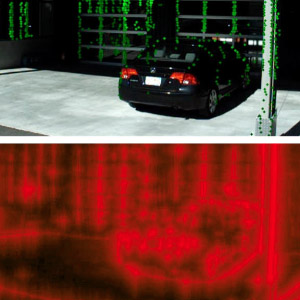 |
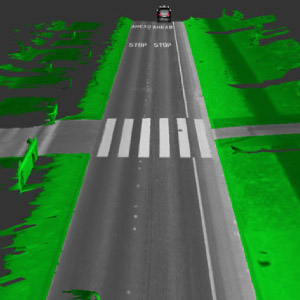
Automatic Online Calibration of Cameras and Lasers
Jesse Levinson and Sebastian Thrun.
Robotics: Science and Systems (RSS), 2013.
Extending previous work on offline 6-DOF calibration
of 3D laser sensors to 2D cameras, this paper presents two new real-time
techniques that enable camera-laser calibration online, automatically,
and in arbitrary environments. The first is a probabilistic monitoring
algorithm that can detect a sudden mis-calibration in a fraction of a second.
The second is a continuous calibration optimizer that adjusts transform
offsets in real time, tracking gradual sensor drift as it occurs.
Together, these techniques allow significantly greater flexibility
and adaptability of robots in unknown and potentially harsh environments.
pdf,
bib
|
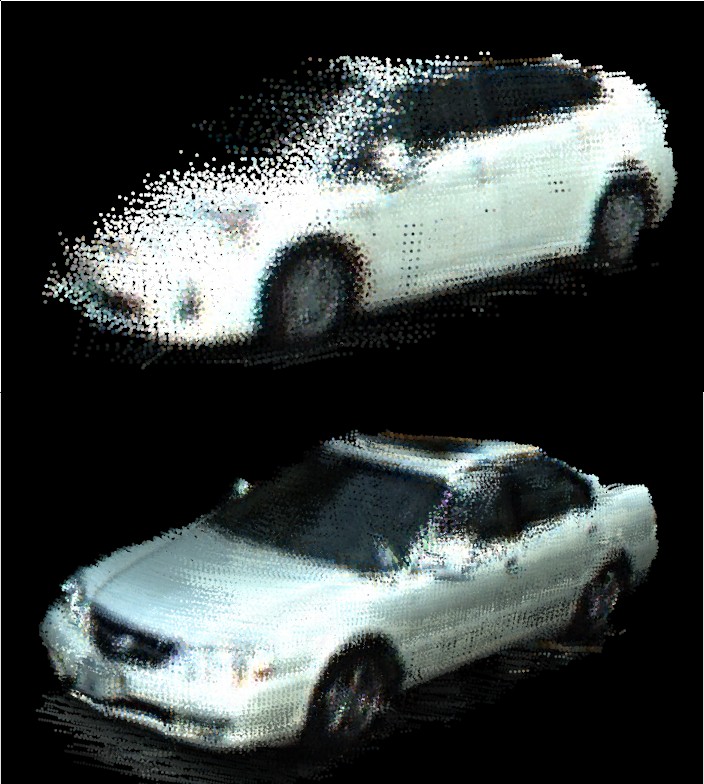 |
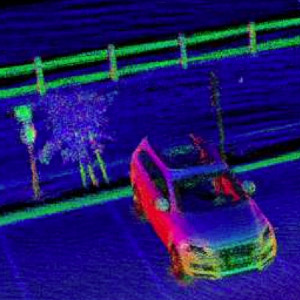
Precision Tracking with Sparse 3D and Dense Color 2D Data
David Held, Jesse Levinson, and Sebastian Thrun.
International Conference on Robotics and Automation (ICRA), 2013.
Precision tracking is important for predicting
the behavior of other cars in autonomous driving. We present a novel
method to combine sparse laser data with a high-resolution camera image
to achieve accurate velocity estimates of moving objects. We present
a color-augmented, pre-filtered grid search algorithm to align the
points from a tracked object, thereby obtaining much more precise
estimates of the tracked vehicle’s velocity than were possible with
previous methods.
pdf,
bib
|
 |
Automatic Calibration of Cameras and Lasers in Arbitrary Scenes
Jesse Levinson and Sebastian Thrun.
International Symposium on Experimental Robotics (ISER), 2012.
This paper presents a new algorithm for automatically
calibrating cameras to multi-beam lasers on a mobile robot given a
series of frames from both sensors. Our method does not require the
use of a known calibration target, nor does it require any hand
labeling of correspondences. Even without these requirements, by
leveraging unsupervised data, it still outperforms previous
state-of-the-art calibration techniques by a significant margin.
bib
|
 |
Online, semi-supervised learning for long-term interaction with object recognition systems
Alex Teichman and Sebastian Thrun.
Invited talk at RSS Workshop on Long-term Operation of Autonomous Robotic Systems in Changing Environments, 2012.
Tracking-based semi-supervised learning, as originally
presented at RSS2011, was an offline algorithm. This is fine in some
contexts, but ideally a user could provide new hand-labeled training
examples online, as the system runs, without retraining from scratch.
Qualitatively, this would mean the ability to point out - from the
back seat of your autonomous car - a few examples of, say, an
elliptical bike or
sk8poler, and tracking-based semi-supervised learning would start learning to
recognize them on the fly without you having to do anything else.
This talk discusses some preliminary work in this direction.
presentation
|
 |
Tracking-based semi-supervised learning
Alex Teichman and Sebastian Thrun.
International Journal of Robotics Research (IJRR), 2012.
Extended journal version of previous work with the same title.
More experiments, more intuition as to how the method works.
pdf (sage),
bib
|
 |
A Probabilistic Framework for Object Detection in Images using Context and Scale
David Held, Jesse Levinson, and Sebastian Thrun.
International Conference on Robotics and Automation (ICRA), 2012.
Detecting cars in real-world images is an important
task for autonomous driving, yet it remains unsolved. The system
described in this paper takes advantage of context and scale to build
a monocular single-frame image-based car detector that significantly
outperforms previous state-of-the-art methods. By using a calibrated
camera and localization on a road map, we are able to obtain context
and scale information from a single image without the use of a 3D laser.
pdf,
bib
|
 |
Practical object recognition in autonomous driving and beyond
Alex Teichman and Sebastian Thrun.
IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO), 2011.
This paper gives an overview of the recent object recognition
research in our lab and what is needed to make it a fully functional,
high accuracy object recognition system that is applicable beyond
perception for autonomous driving.
pdf,
bib
|
 |
Tracking-based semi-supervised learning
Alex Teichman and Sebastian Thrun.
Robotics: Science and Systems (RSS), 2011.
Building on previous work, we introduce a simple semi-supervised
learning method that uses tracking information to find new, useful training
examples automatically. This method achieves nearly the same accuracy
as before, but with about two orders of magnitude less human labeling effort.
pdf,
bib,
project,
RSS proceedings
|
 |
Towards 3D object recognition via classification of arbitrary object tracks
Alex Teichman, Jesse Levinson, and Sebastian Thrun.
International Conference on Robotics and Automation (ICRA), 2011.
Breaking down the object recognition problem into segmentation,
tracking, and track classification components, we show an accurate and
real-time method of classifying tracked objects as car, pedestrian,
bicyclist, or 'other'.
pdf,
bib,
dataset
|
 |
Towards fully autonomous driving: systems and algorithms
Jesse Levinson, Jake Askeland, Jan Becker, Jennifer Dolson, David Held,
Soeren Kammel, J. Zico Kolter, Dirk Langer, Oliver Pink, Vaughan Pratt,
Michael Sokolsky, Ganymed Stanek, David Stavens, Alex Teichman,
Moritz Werling, and Sebastian Thrun.
Intelligent Vehicles Symposium, 2011.
This paper is a broad summary of recent work on Junior,
Stanford's autonomous vehicle. Topics covered include object recognition,
sensor calibration, planning, control, etc.
pdf,
bib
|
 |
Traffic Light Mapping, Localization, and State Detection for Autonomous Vehicles
Jesse Levinson, Jake Askeland, Jennifer Dolson, and Sebastian Thrun.
International Conference on Robotics and Automation (ICRA), 2011.
We present a passive camera-based pipeline for
traffic light state detection using imperfect vehicle localization
and assuming prior knowledge of traffic light location. To achieve
robust real-time detections in a variety of lighting conditions,
we combine several probabilistic stages that explicitly account for
the corresponding sources of sensor and data uncertainty.
pdf,
bib
|
 |
Automatic laser calibration, mapping, and localization for autonomous vehicles
Jesse Levinson.
Thesis (Ph.D.), Stanford University, 2011.
This dissertation presents several related algorithms
that enable important capabilities for self-driving vehicles. These include
offline mapping and online map-based localization techniques using GPS, IMU,
and lasers, online localization without a prerecorded map as used in the
DARPA Urban Challenge, intrinsic and extrinsic calibration algorithms
for multi-beam lasers, and realtime detection of traffic lights.
pdf,
Stanford Library,
bib
|
 |
Unsupervised Calibration for Multi-beam Lasers
Jesse Levinson and Sebastian Thrun.
International Symposium on Experimental Robotics (ISER), 2010.
This paper introduces an unsupervised solution
for solving the intrinsic and extrinsic calibration properties of a
multi-beam laser on a mobile robot in arbitrary, unknown environments.
By defining and optimizing an objective function that rewards
3D consistency between points seem by different beams, we are able
to calibrate internal angles, range offsets, and remittance response
curves for each beam in addition to the 6-DOF position of the laser
relative to the vehicle's inertial frame.
pdf,
bib
|
 |
Robust Vehicle Localization in Urban Environments Using Probabilistic Maps
Jesse Levinson and Sebastian Thrun.
International Conference on Robotics and Automation (ICRA), 2010.
We extend previous work on localization using GPS,
IMU, and LIDAR data by modeling the environment as a probabilistic grid
in which every cell is represented as its own gaussian distribution over
remittance values. This approach offers higher precision, the ability
to learn and improve maps over time, and increased robustness to
environment changes and dynamic obstacles.
pdf,
bib
|
 |
Exponential family sparse coding with application to self-taught learning
Honglak Lee, Rajat Raina, Alex Teichman, and Andrew Y. Ng.
International Joint Conference on Artificial Intelligence (IJCAI), 2009.
pdf,
bib
|
 |
Map-Based Precision Vehicle Localization in Urban Environments
Jesse Levinson and Sebastian Thrun.
Robotics: Science and Systems (RSS), 2007.
GPS-based inertial guidance systems do not provide
sufficient accuracy for many urban navigation applications, including
autonomous navigation. We propose a technique for high-accuracy
localization of moving vehicles that utilizes maps of urban environments.
Our approach integrates GPS, IMU, wheel odometry, and LIDAR data to
generate high-resolution environment maps. We use offline GraphSLAM
techniques to align intersections and regions of self-overlap, and
a particle filter to localize the vehicle relative to these maps in
real time.
pdf,
bib
|